



Robotics
We are sorry, this page is in Czech language only at this moment. We are translating our website in these days.
Thank you for your patience
Thank you for your patience
V běžných průmyslových se používájí univerzální robotické architektury velkých světových výrobců (Fanuk, Mitsubishi, ...) V některých případech je však nutné vyvinout speciální architertkury manipulátorů z důvodu omezeného prostoru agresivního prostředí, atd. Skupina oddělení automatického řízení je schopna pokrýt celý cyklus vývoje takových speciálních robotů, který typicky obsahuje:
- Výzkum speciálních architektur (optimalizace pracovního prostoru, kinematická a dynamická analýza)
- Realistická 3D simulace včetně systému řízení
- Vyběr komponent, zajištění výroby mechanické části a kompletace
- Vývoj a implementace systému řízení dle požadavků dané aplikaca
- Vývoj operátorského rozhraní (3D HMI), možnost vzdáleného ovládání
Vybavení laboratoří pro výzkum a vývoj v oblasti robotiky
Studenti jsou během studia zapojováni v rámci projektů, semestrálních, bakalářských či diplomových prací do všech etap vývoje moderních robotických architektur. Mají k dispozici komponenty předních světových výrobců i některé prototypové modely. Vybavení laboratoří robotiky obsahuje např.:
- Testovací stand pro elektrické pohony, 3-osý portálový robot Schneider Electric+Berger-Lahr
- Elektrické pohony: B&R, Allen-Bradley, Telemecanique, Servida, Maxon, MEZ
- Frekvenční měniče: B&R Acopos, Allen-Bradley Kinetix, Schneider Electric Lexium, Maxon EPOS, DES
- Programovatelné automaty: B&R X20, Allen-Bradley Compact Logix, ICPDAS WinCon, WinPAC, Allen-Bradley, Siemens
- Průmyslová PC: Advantech, NEXCOM
- Softwarové vybavení: vlastní řídicí systém REX, Matlab/Simulink/Simmechanics, Maple, Mathematica/Modelica, MS Visual Studio, LabView, Genesis, Indusoft, firemní vývojová prostředí dodávaná výrobci PLC
- Piezoelektrické aktuátory
- Šestiosý lanový robot
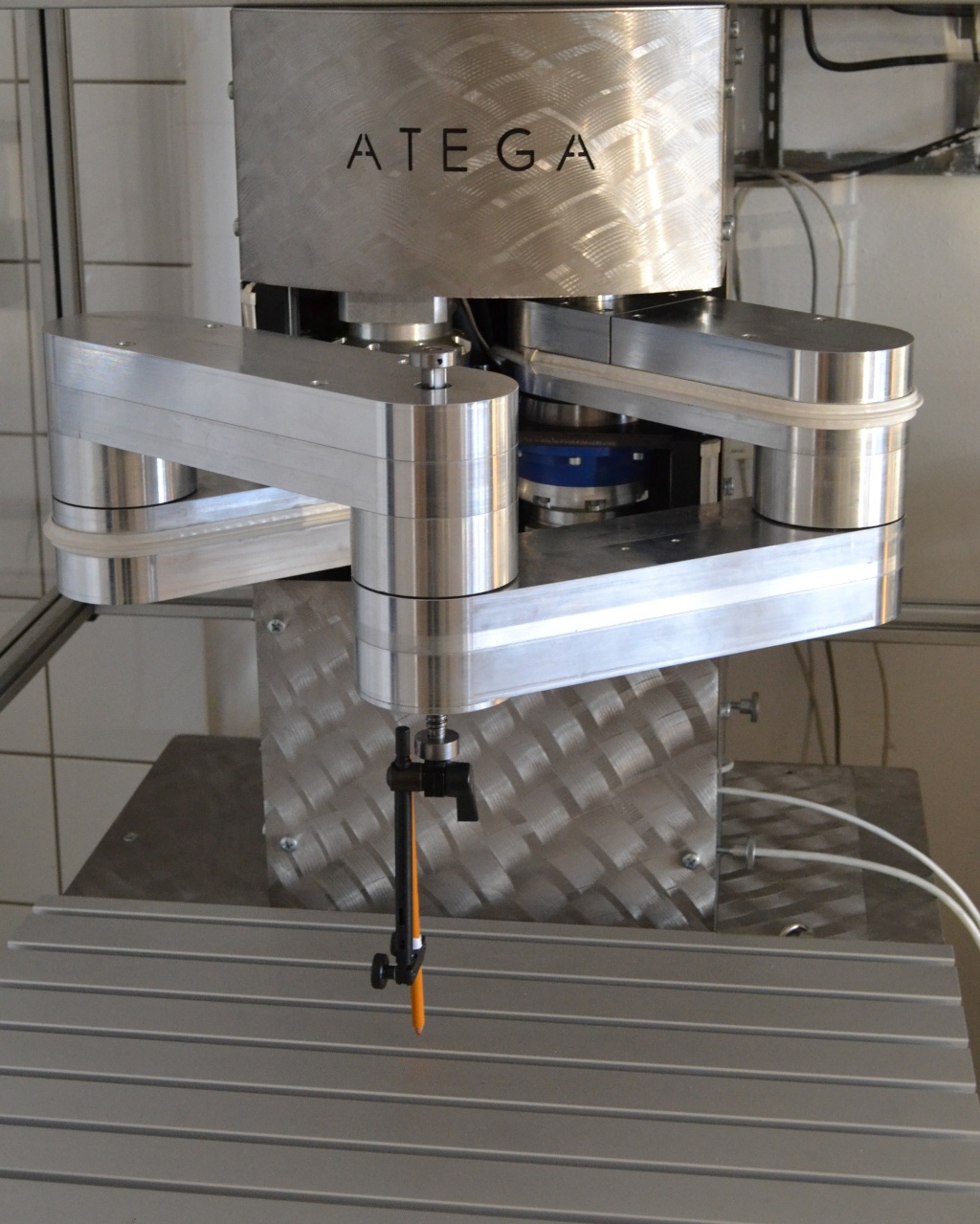
- Paralelní čtyřosý manipulátor pro náročné přesné aplikace typu 'pick and place'
Reference - řešené projekty s průmyslem
- Návrh robotu včetně řízení pro průmyslové odmašťovací a odlakovací stroje (Eurotec JKR s.r.o)
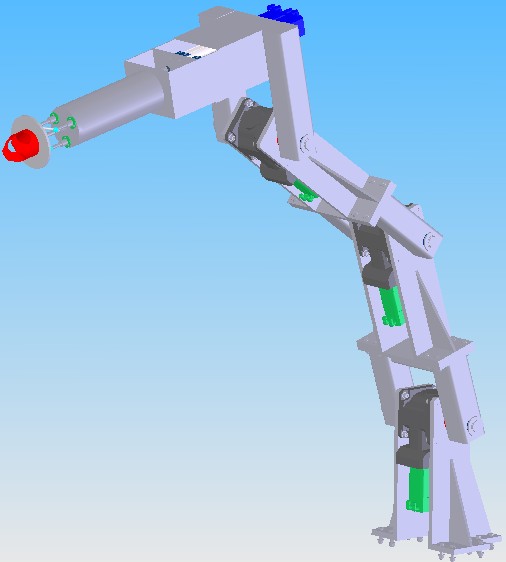
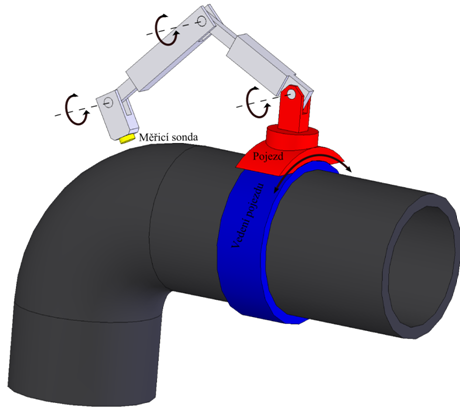
- Návrh a řízení robotů pro automatickou detekci svárů potrubí jaderných elektráren (ÚJV Řež)
- Návrh a řízení testovacích stendů pro automobilový průmysl (ZF Engineering)
- Vývoj řízení lanových robotů jevištní techniky (ZAT a.s.)